ACELERACIÒN TANGENCIAL
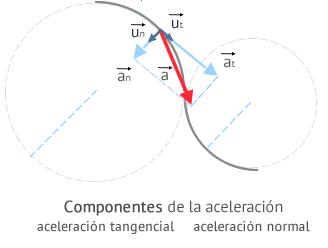
La aceleración tangencial es el producto de la aceleración angular y el radio del círculo. Es decir, la aceleración tangencial en el instante ( t0) es: La aceleración tangencial es un vector que está sobre la tangente del punto de la circunferencia y cuyo sentido es igual al de giro.
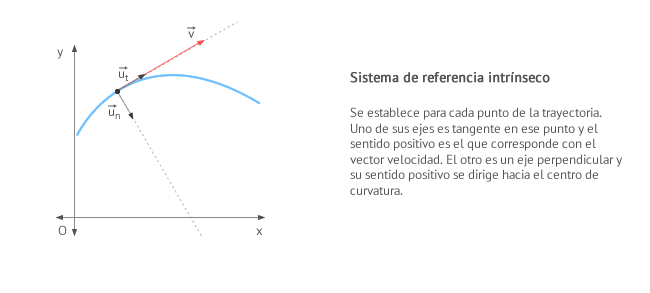
Vemos que el primer término (dv→dtu→t
) es tangencial a la trayectoria por estar multiplicando el vector unitario u→t
. A dicho término se le conoce con el nombre de aceleración tangencial y coincide con el concepto cotidiano de aceleración, que es el del cambio del módulo de la velocidad.
El valor de la aceleración tangencial puede ser:
- Mayor que cero (> 0): Cuando el cuerpo tiene un movimiento acelerado, es decir, el módulo del vector velocidad aumenta con el tiempo
- Menor que cero (<0): Cuando el cuerpo tiene un movimiento retardado o decelerado, es decir, el módulo del vector velocidad disminuye con el tiempo
- Igual a cero (= 0): Cuando el cuerpo tiene un movimiento uniforme, es decir, el módulo del vector velocidad permanece constante
La aceleración tangencial es el producto de
la aceleración angular y el radio del círculo. Es decir,
la aceleración tangencial en el instante (t0) es:

La aceleración tangencial es un vector que está sobre la
tangente del punto de la circunferencia y cuyo sentido es igual al de giro.
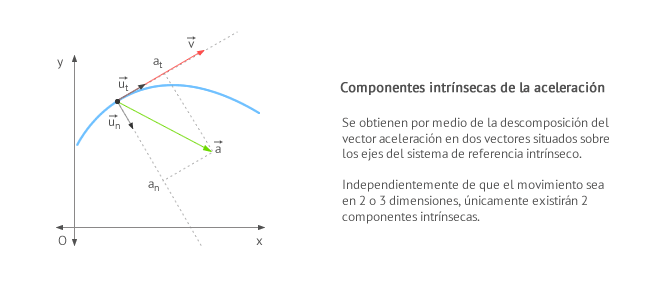
La aceleración tangencial y la aceleración
centrípeta son las componentes intrínsecas de la aceleración.

 Aceleración
tangencial en el movimiento circular uniforme (MCU)
Aceleración
tangencial en el movimiento circular uniforme (MCU)
En el movimiento circular uniforme (MCU), tanto
la aceleración angular como la aceleración tangencial son cero, ya
que las velocidades son constantes.
Aceleración tangencial en el movimiento circular
uniformemente acelerado (MCUA)
La aceleración tangencial en el movimiento circular
uniformemente acelerado MCUA se calcula como el incremento de velocidad
angular ω desde el instante inicial hasta el final partido por el
tiempo y multiplicado por el radio.

La aceleración tangencial, at es mayor que cero
cuando la velocidad angular w (o, lo que es lo mismo, la velocidad
angular vt) se incrementa con el tiempo.
La aceleración tangencial, at es menor que cero
cuando la velocidad angular w (o, lo que es lo mismo, la velocidad
angular vt) disminuye con el tiempo